
Ayúdanos a mantenernos en órbita

¿Nuestros contenidos te están resultando de utilidad?
Con un pequeño gesto podremos mantenernos en órbita. Regístrate para acceder a contenidos y funcionalidad exclusiva. Además, con tu ayuda podremos continuar ofreciendo nuestros servicios de manera gratuita para miles de estudiantes en todo el mundo. Te ofrecemos:
- Un campus virtual orientado a la gamificación
- Nuevos contenidos premium
- Nuevas simulaciones
- Acceso prioritario a nuestro plantel de profesores de física y matemáticas
Movimiento en el que la trayectoria descrita corresponde con una circunferencia. Para analizar este tipo de movimiento se suelen utilizar magnitudes angulares:
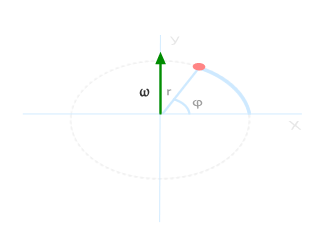
Posición angular (φ). Magnitud angular fundamental que representa el ángulo que forma en cada momento el vector de posición de un cuerpo con el semieje X positivo. Su unidad en el Sistema Internacional de Unidades (S.I.) es el radián (rad).
Velocidad angular (ω). Magnitud angular que representa el ángulo recorrido por un cuerpo en un segundo. Su unidad en el Sistema Internacional de Unidades (S.I.) es el rad/sg.
Aceleración angular (α). Magnitud angular que representa la variación de velocidad angular respecto al tiempo. Su unidad en el Sistema Internacional de Unidades (S.I.) es el rad/sg2.
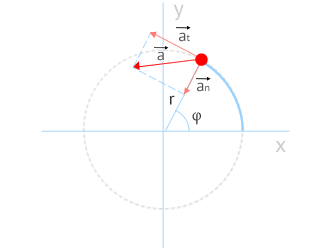
Aceleración normal (an). Magnitud angular que representa la variación de la dirección del vector velocidad (lineal) de un móvil a lo largo del tiempo.
Aceleración tangencial (at). Magnitud lineal que representa las variaciones del módulo del vector velocidad (lineal) de un móvil a lo largo del tiempo.
La aceleración de un movimiento circular se calcula como la suma de la aceleración tangencial y la aceleración normal.
Relación entre magnitudes angulares y lineales
La posición angular permite relacionar las magnitudes lineales con las angulares por medio del radio de la circunferencia (r). Así,
espacio recorrido (s): s = φ · r
velocidad lineal (v). v = ω · r
aceleración tangencial (at). at = α · r
La aceleración normal no tiene una equivalencia en las magnitudes lineales.