Engranajes
Los engranajes se tratan de sistemas conformados por dos o más ruedas dentadas que encajan entre sí. Se denominan sistemas de transmisión circular porque son capaces de transmitir el movimiento circular, la potencia y la fuerza desde un motor hasta otro elemento denominado receptor. La rueda dentada que se encuentra unida directamente al motor recibe el nombre de engranaje de entrada y la rueda unida al receptor se denomina engranaje de salida.
Al igual que ocurre con las ruedas de fricción, en el caso más simple formado por dos engranajes, el engranaje de entrada gira empujando con el engranaje de salida provocando que este gire también aunque en sentido contrario.
Si se introducen engranajes intermedios entre el engranaje de entrada y de salida provocaremos alternancias en el giro de cada una de las ruedas. Estos engranajes intermedios reciben el nombre de engranajes locos.
La velocidad de giro de los engranajes, también conocida como velocidad angular, se suele expresar en dos unidades:
- revoluciones por minuto (rpm). Número de vueltas que da una rueda en un minuto.
- revoluciones por segundo (rps). Número de vueltas que da una rueda en un segundo.
Engranajes
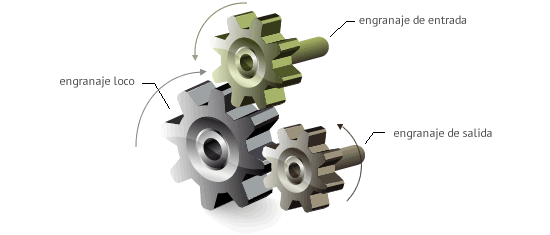
La figura muestra tres engranajes conectados entre sí. El engranaje unido al motor se le denomina engranaje de entrada, y el que está conectado al receptor del movimiento recibe el nombre de engranaje de salida. Los engranajes intermedios se conocen como engranajes locos. Observa que dos engranajes conectados directamente tienen sentidos de giro distinto.
Los engranajes se suelen utlizar para transmitir grandes fuerzas ya que no deslizan entre sí, tal y como ocurre con las ruedas de fricción o las poleas.
Tipos de Engranajes
Existen diferentes tipos de engranajes que permiten que los ejes de los engranajes de entrada y de salida permanezcan perpendiculares, paralelos u oblicuos. Para ello se pueden utlizar engranajes cilíndricos u oblicuos acompañados de dientes paralelos o helicoidales.
Tipos de Engranajes
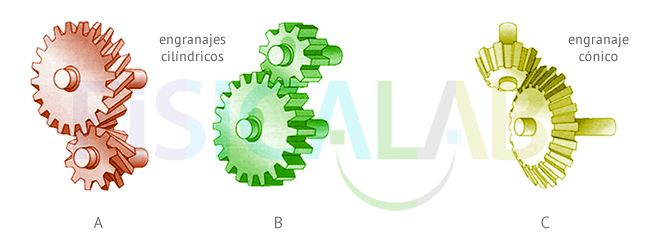
A. Engranaje cilíndrico con dientes helicoidales. B. Engranaje cilíndricos con dientes paralelos. C. Engranaje cónico con dientes paralelos.
Relación de transmisión de los engranajes
Tal y como estudiamos en el apartado anterior, la relación de transmisión i es una magnitud adimensional que representa el número de veces que el engranaje de salida gira más que el engranaje de entrada, cumpliéndose que:
donde:
- i es la relación de transmisión.
- Ns es el valor de la velocidad de giro del engranaje de salida.
- Ne es el valor de la velocidad de giro del engranaje de entrada.
En general, en este tipo de mecanismos la relación de transmisión entre dos engranajes dependerá del número de dientes de los engranajes de entrada y salida.
De esta forma si el número de dientes del engranaje de entrada Ze y el número de dientes del engranaje de salida Zr son:
- Ze = Zr. La velocidad de giro del engranaje de salida será el mismo que el de la entrada. i = 1.
- Ze > Zr. La velocidad de giro del engranaje de salida será mucho mayor que el de la entrada. Es lo que se conoce como un sistema multiplicador de velocidad. i > 1
- Ze < Zr. La velocidad de giro del engranaje de salida será mucho menor que el de la entrada. Es lo que se conoce como un sistema reductor de velocidad. i < 1.
Matemáticamente podemos expresar la relación existente entre el número de dientes de los engranajes y la relación de transmisión mediante la siguiente expresión:
Y ahora... ¡Ponte a prueba!

Apartados relacionados
El apartado no se encuentra disponible en otros niveles educativos.