Momento Angular
El momento angular es una magnitud vectorial que utilizamos en física para caracterizar el estado de rotación de los cuerpos. En este apartado trataremos los siguientes puntos:
- El momento angular de una partícula puntual: Lo utilizamos para caracterizar el estado de rotación de un punto o de un cuerpo que se pueda tratar como tal. Recuerda que esto sucede cuando las dimensiones del cuerpo son despreciables frente a las de la trayectoria de su movimiento
- Qué es el momento de inercia de una partícula y como se relaciona con el momento angular
- El momento angular de un sistema de partículas: Lo utilizamos, por ejemplo, para caracterizar el estado de rotación del sólido rígido
- Cuándo varía el momento angular
- Bajo qué condiciones se conserva
Adicionalmente, puede que te interese profundizar en el concepto de sólido rígido.
Antes de comenzar a tratar el momento angular en sí, debemos hablar del convenio que seguimos cuando tratamos las magnitudes angulares como vectores.
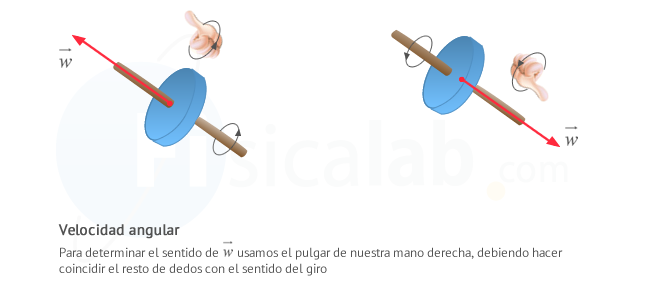
Magnitudes angulares vectoriales
Para poder describir con precisión y coherencia cómo se comportan los cuerpos cuando rotan hemos de presentar como vectores las magnitudes angulares cinemáticas. Para ello debemos llegar a algún tipo de acuerdo sobre la dirección y sentido que presentarán estás magnitudes, ya que estos nos son tan claros como el caso de la velocidad lineal, por ejemplo, o la fuerza que se ejerce sobre una partícula.
Consideraremos como punto de aplicación el centro geométrico y como dirección el eje de giro. El sentido del vector varía en función de la magnitud que consideramos.
| Nombre | Símbolo | Valor | Dirección | Sentido |
|---|---|---|---|---|
| Posición angular | -- | La del eje de giro | Regla mano derecha | |
| Velocidad angular | La del eje de giro | Regla mano derecha | ||
| Aceleración angular | La del eje de giro | En función de si hace crecer o decrecer |
Además, podemos relacionar las magnitudes angulares anteriores con las lineales velocidad instantánea y aceleración tangencial a través de las siguientes expresiones:
Momento angular de un punto material
Se define el momento angular o cinético de una partícula material respecto a un punto O como el momento de su cantidad de movimiento, es decir, el producto vectorial de su vector de posición por su momento lineal:
Donde:
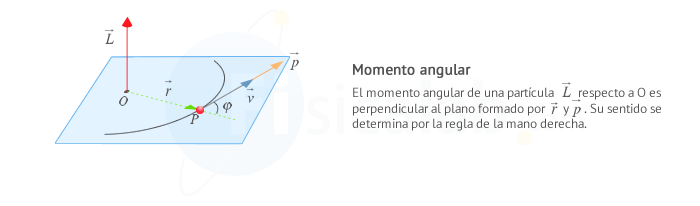
El momento angular de un punto material se define a partir de un vector de posición y una partícula puntual en movimiento, esto es, con cierta velocidad instantánea. Observa que no es una magnitud propia del cuerpo, sino que depende del punto de referencia que se escoja. Su significado físico tiene que ver con la rotación: El momento angular caracteriza el estado de rotación de un punto material, del mismo modo que el momento lineal caracteriza el estado de traslación lineal. Para entender bien esta idea, vamos a presentar una nueva magnitud: el momento de inercia.
Momento de Inercia
Podemos definirlo para el caso concreto de los movimientos circulares.
Se define el momento de inercia I de una masa puntual como el producto de la masa de dicho cuerpo por su distancia al eje de giro. Su expresión viene dada por:
Donde:
- I : Momento de inercia. Su unidad de medida en el Sistema Internacional (S.I) es el kg·m2
- m : Masa del cuerpo. Su unidad de medida en el SIstema Inernacional (S.I.) es el jg
- r : Es la distancia al centro de giro. También se puede decir que es el módulo del vector de posición del cuerpo respecto al centro de giro. Su unidad de medida en el Sistema Internacional (S.I.) es el metro.
Podemos relacionar el momento de inercia de una partícula puntual en movimiento circular con su momento angular. Recuerda que el vector de posición de un cuerpo que gira en movimiento circular respecto al centro de giro de dicho movimiento y el vector velocidad forman un ángulo de 90º. Entonces, a partir de la expresión del momento angular podemos escribir:
Quedando en notación vectorial:
Donde hemos tenido en cuenta que la velocidad angular se considera un vector axial que es perpendicular al plano de giro y con el sentido que determine la regla de la mano derecha.
Observa la analogía que hay entre la expresión anterior y
Momento angular y momento de inercia de un sólido rígido
También podemos considerar un sólido rígido en rotación. En este caso, queremos caracterizar la rotación del sólido rígido respecto a su eje de giro. ¿Cómo procederemos? Podemos imaginar un disco plano, en lugar de una masa puntual, y calcular el momento angular Li de cada partícula respecto a dicho eje de rotación . La suma de cada uno de ellos es, justamente, el momento angular del disco. Empecemos.
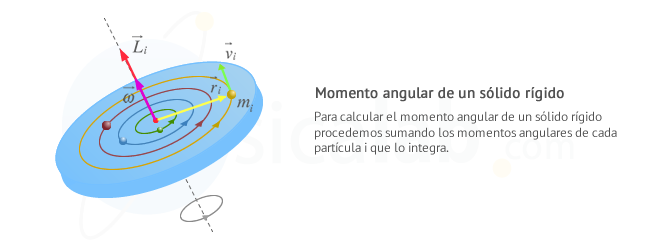
El momento angular de cada partícula genérica i viene dado por:
Teniendo en cuenta que en los movimientos circulares ambos vectores son perpendiculares, podemos desarrollar la expresión del módulo del momento angular de cada partícula tal y como vimos antes:
Ahora bien, la velocidad angular de cada partícula
Como
Observa que, el término entre paréntesis se asemeja a la expresión del momento de inercia de una partícula. Decimos que
El momento angular de un sólido rígido caracteriza su estado de rotación. Su expresión viene dada por:
Donde:
- I : Momento de inercia del sólido. Representa un factor de oposición a los cambios en el estado de rotación del cuerpo. Depende de la masa del sólido y de la distribución de dicha masa con respecto al eje de rotación elegido. Aunque en general existen infinitos momentos de inercia posibles, tanto como ejes de rotación se puedan elegir, su expresión, para el caso del sólido rígido discreto, es:
Para llegar a la expresión anterior del momento angular hemos considerado como referencia el eje de giro de un disco. En general, la elección de un eje adecuado tiene importancia para el cálculo del momento angular.
Observa que, tal y como venimos diciendo, las expresiones
- En el momento angular la velocidad angular
- En el momento angular el momento inercial I se opone a los cambios en el estado de rotación del cuerpo. En el momento lineal la masa m se opone a los cambios en el estado de traslación
Finalmente, sabemos que para variar el momento lineal hemos de ejercer una fuerza. ¿Adivinarías qué hemos de hacer para variar el momento angular?
Variación del momento angular en el tiempo
Para saber qué hemos de hacer para variar el momento angular de un cuerpo, vamos a derivar su momento angular respecto al tiempo.
Donde en [1] hemos aplicado la definición de derivada de un producto como
Ahora,
El momento angular
Observa que cuando hablamos de momento de fuerza nos referimos al momento del vector fuerza respecto al origen o eje considerado. La expresión anterior es válida para partículas puntuales, pero también lo es para sistemas de partículas, en los que sólo el momento de las fuerzas externas al propio sistema puede producir cambios en el momento angular del sistema.
Conservación del momento angular
A partir de la expresión anterior, podemos determinar cuándo se conserva el momento angular, según estemos en una partícula puntual o en un sólido rígido.
Masa puntual
El momento angular se conserva cuando el momento de las fuerzas que actúan sobre ella es nulo
Sólido rígido
El momento angular se conserva cuando el momento de las fuerzas exteriores que actúan sobre el sólido es nulo
Observa que existen fundamentalmente dos condiciones bajo las cuales se cumple lo anteior
- La fuerza neta
- La fuerza
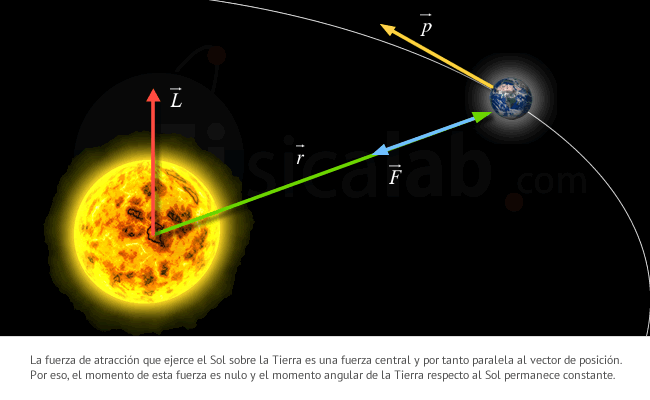
Ejemplos
Los sistemas planetarios son sistemas de fuerzas centrales. La Tierra experimenta fuerzas atractivas definidas por la ley de la Gravedad y dirigidas hacia el centro de Sol. Su momento angular es constante.
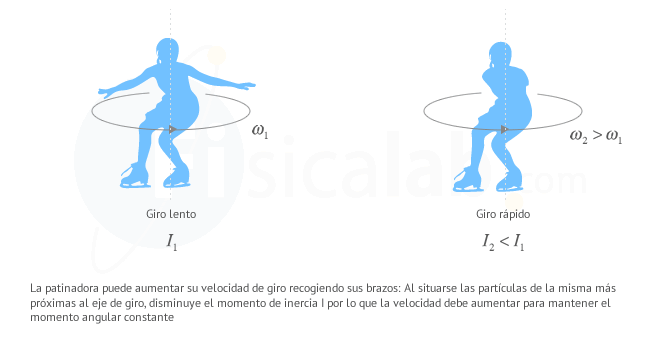
Una patinadora que mientras gira recoge sus brazos es otro ejemplo interesante. Al recoger sus brazos la distribución de masas respecto al eje varía: toda la masa se concentra más cerca del mismo por lo que el momento de inercia disminuye. En el movimiento de plegar los brazos no son necesarios momentos de fuerza, por lo que el momento angular permanece constante. Observa qué ocurre entonces:
Esto significa que, dado que I2 es menor que I1, la velocidad angular
Y ahora... ¡Ponte a prueba!

Apartados relacionados
El apartado no se encuentra disponible en otros niveles educativos.